Как собрать робота своими руками
Собрать собственного робота — это мечта чуть ли не каждого мальчишки. Можно вспомнить и повальное увлечение роботами в Советском Союзе, особенно в 70-80 годах, и попытки создать крутых терминаторов после одноимённого фильма, и даже целые турниры, где роботы сражались за первенство, уничтожая друг друга на арене. В общем, роботы увлекали людей со дня сборки первой модели.
И если раньше для создания робота требовались большие деньги, много времени и сил, то теперь их сборка представляет собой конструктор. Ты устанавливаешь детали на платформу, заливаешь код на плату (готовый или самописный — зависит от твоих навыков в программировании и того, что ты ждёшь от робота), и вот, готовый терминатор, который будет служить тебе верой и правдой.
Звучит несложно. Но это только на словах. На деле же для сборки робота, а не радиоуправляемой игрушки, умеющей ездить только вперёд и назад, нужно много разных деталей. В этой статье мы расскажем тебе о том, как собрать простого робота из недорогих деталей.
База
Базой любого робота является его подвижная часть. База может быть колёсной или гусеничной, но мы рекомендуем именно гусеничную. Такая база имеет лучшую проходимость, нежели колёсная, может поворачиваться на месте, а также более устойчива на неровной поверхности. Некоторые при сборке робота на гусеничной базе покупают игрушечный танк, разбирают и оставляют только базу, на которую крепят плату и другие детали. Это вариант неплохой, но затратный. Проще и дешевле купить гусеничную базу. Пример такой базы — пластина для Rover. Ссылка на неё ниже. Плюс этой базы в том, что на ней закреплено пластиковое основание, которое позволяет легко закрепить плату микроконтроллера Arduino, драйвер двигателей, элементы питания и датчики. Это делает возможным быстро собрать робота без необходимости разметки и сверления.
Купить гусеничную базу →
Платы
Часто в качестве основной платы выбирают «Arduino». Они простые в монтаже, достаточно мощные и надёжные. Но железо не ограничивается только одной платой, и для функционирования робота требуются драйверы двигателя, микросхемы, транзисторы — в общем, много сложных деталей.
Для твоего первого робота мы рекомендуем набор «Ардуино ДВ», ссылка на который будет ниже. В этом наборе очень много деталей, которые позволяют создать робота, не задумываясь о том, что тебе ещё нужно докупить для его нормального функционирования. В комплекте идет плата «Ардуино» UNO R3, макетная плата МВ-102, реле, датчики наклона, огня, температуры, влажности и уровня воды, шаговый двигатель, драйвер шагового двигателя, резисторы от 220 Ом до 10 кОм, светодиоды, тактовые кнопки, зуммеры, фоторезисторы, индикаторы, серводвигатель, ИК-приёмник, ИК-пульт, джойстик, LED матрица, LCD экран и другие детали. В наборе доступно 33 урока по сборке робота.
Кстати, покупать такие наборы удобнее, чем заказывать отдельные детали. Во-первых, в комплекте есть всё необходимое. Во-вторых, цена на 40% ниже, чем если бы ты покупал детали по отдельности. И в-третьих, проверенные детали. К комплекту «Ардуино ДВ» можно докупить дополнительные модули и датчики, сделав робота более функциональным. Лучший выбор для новичка.
Купить комплект Ардуино ДВ →
Дополнительные датчики
Чтобы твой робот не бился об стены и другие преграды, его нужно оснастить датчиками препятствия. Существуют датчики столкновений, датчики линий, инфракрасные датчики, ультразвуковые дальномеры и другие датчики. Также, чтобы сделать робота умным, можно оснастить его датчиками движения и освещения, которые позволят ему ориентироваться на местности, объезжая не только статичные, но и динамичные объекты. Рекомендуем устанавливать минимум два датчика препятствий на передней части робота. Желательно установить ещё два датчика и в задней части. Помни: чем больше датчиков, тем лучше.
Купить датчики →
Питание
От качества системы питания будет зависеть продолжительность функционирования робота на одном заряде. Основной деталью является блок питания. Рекомендуем выбирать блок питания с входным и выходным фильтром от электромагнитных помех, защитой от превышения выходного напряжения, потребляемого тока и короткого замыкания на выходе. Это защитит робота даже при скачках напряжения.
Далее от блока питания ток поступает на платы и батареи. Для того чтобы робот был автономным, необходимо установить блок для батареек. Блоки бывают как компактными, для небольших круглых батареек, так и массивными, в которые устанавливается 10 батареек АА. Помни, что чем больше блок для батареек, тем больше вес робота. Если ты собираешь компактного робота, то лучше выбрать блок на 2 батарейки.
Также вместо батареек ты можешь установить блок питания, защищённый от воздействия влаги и солнечного света. Блок питания подойдёт в случае, если ты собираешься управлять роботом на улице.
Купить элементы питания →
Перечисленные выше детали для сборки робота мы нашли в интернет-магазине «ДВ Робот». Также в магазине есть радиодетали, провода, кабели, разъёмы и комплектующие. Кроме того, в разделе «Майнинг» ты найдёшь всё необходимое для майнинга криптовалют. В разделе «Базар» ты можешь бесплатно разместить объявление для продажи товаров и услуг или найти вещи по невысокой цене. В разделе «Новинки» ты обнаружишь много интересных товаров: например, 3D-принтеры, карбон и кевлар, а также платы и инструменты.Посмотреть новинки интернет-магазина «ДВ Робот» →
brodude.ru
Как сделать шагающего робота-игрушку

The Wrench собрал простого шагающего робота-игрушку. Сейчас посмотрим как он это сделал.
Для того чтобы сделать робота нам понадобится:
1. Фанера
2. Стальная проволока
3. 2 Батарейки типа крона
4. Электрический мотор-редуктор ссылка
5. 2 шестерни (одна поменьше, а другая побольше)
6. Переключатель или кнопка
7. Разъём для кроны
8. Стержень от шариковой ручки
9. Провод


Приступим к созданию самоделки!
1.Вырезаем из фанеры несколько треугольников нужных размеров и сверлим в них отверстия.
2. Вырезаем из фанеры прямоугольник и склеиваем его с двумя треугольниками.
3. Возьмём стальную проволоку, проденем её через отверстие в фанере. Не забываем надеть большую шестерню.
4. Берём 1 крону и избавляем её от контактов при помощи плоскогубцев. Приклеиваем к фанере, а сверху крепим мотор.
5. Отрезаем ещё два куска от стальной проволоки и вставляем в оставшиеся отверстия. Нарезаем 6 небольших прямоугольников из фанеры и крепим их на проволоке. Для лучшего склеивания используем стержень от шариковой ручки.
6. На осях приклеиваем оставшиеся 2 треугольника тем же способом.
7. Паяем провода между переключателем, мотором и разъёмом для кроны. Крепим батарейку.
8. Все детали надёжно заклеиваем и украшаем робота.
9. Покраска и готово.
P.S. Вместо фанеры можно использовать текстолит, плотный картон или пластик.
Источник
 Доставка новых самоделок на почту
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.usamodelkina.ru
делаем боевого робота в домашних условиях. Часть 1 / Golf Robotics corporate blog / Habr
Ниже представлена информация для конструкторов по созданию роботов-участников боёв Бронебот.1. Конструкция
1.1. Вес. Роботы представлены в трех весовых категориях. В зависимости от выбранной участником категории, максимальный вес роботов составляет:
- Тяжелый класс: 100 кг.
- Средний класс: 50 кг.
- Легкий класс: 17 кг.
Для ходящих роботов предельный вес составляет на 30% больше во всех классах. Ходящие роботы не должны использовать коленвал для перемещения.
1.2. Максимальные размеры конструкции зависят от категории:
- Тяжелый класс: 1.5 х 1 метров в длину и ширину.
- Средний класс: 1 х 0.75 метров в длину и ширину.
- Легкий класс: 0.5 х 0.5 метров в длину и ширину.
- Высота не ограничена.
1.3. Разрешено использование кластерных роботов (способных разделяться на несколько независимых роботов). При начале боя робот должен быть единым целым. При повреждении 50% ботов и более, робот считается проигравшим.
1.4. Роботы должны быть оснащены тумблерами ВКЛВЫКЛ в части, отдаленной от оружия, полностью отключающими питание всех подсистем робота. Если тумблеров несколько, они должны находиться рядом. Тумблеры могут быть спрятаны под оболочкой, но должны быть доступными без переворачивания робота или разборки с помощью инструментов.
1.5. Летающие роботы запрещены.
2. Электричество
2.1. Напряжение питания роботов не должно превышать 36 Вольт.
2.2. Все электрические соединения должны сделаны качественно и на должном уровне изолированы. Кабели должны быть проложены с минимальным шансом быть разорванными.
2.3. Аккумуляторы должны быть полностью изолированные и не содержать жидкостей. Соединения аккумуляторов должны быть полностью изолированными.
2.4. Двигатели внутреннего сгорания запрещены.
3. Гидравлика
3.1. Давление в гидравлических линиях не должно превышать 204 атм (3000 psi/20.4 mps).
3.2. Гидравлические жидкости должны находиться в надежных емкостях внутри робота. Все гидравлические линии должны быть проложены с минимальным шансом быть поврежденными.
4. Пневматика
4.1. Давление в пневматеческих линиях не должно превышать 68 атм (1000 psi/6.8 mps).
4.2. Пневматические емкости должны быть подлежащего качества, промышленного производства. Давление в них должно соответствовать спецификации производителя.
4.3. Пневматические емкости должны быть закреплены внутри робота и защищены от повреждений.
4.4. Газы для пневматики должны быть невоспламеняющимися или инертными, например, воздух, углекислый газ, аргон, азот.
4.5. Должна быть предусмотрена возможность спустить давление в системе без разбора конструкции.
5. Оружие
5.1. Каждый робот должен быть оснащен минимум одним активным оружием.
5.2. Запрещенное оружие:
- Пиротехника
- Огнеметы
- Жидкости
- Едкие вещества
- Неуправляемые снаряды
- Электрошокеры
- Радиоглушители
- Тепловые пушки
- Гауссганы
- Любое оружие, использующее горящие или воспламеняющиеся газы
5.3. Скорость вращающегося оружия (циркулярные пилы, вращающиеся лезвия и т.п.) не должны превышать спецификации производителя. Спецификации должны быть доступны для проверки.
5.4. Вращающие диски из закаленной стали и лезвия, которые при поломке образовывают осколки, запрещены.
5.5. Длина лезвийштыков не должна превышать 20 см.
5.6. Все подвижные манипуляторы, даже не содержащие оружия, должны иметь фиксирующие крепежи. Крепежи должны быть закрытыми во всех случаях, кроме нахождения робота на арене или техобслуживании.
5.7. Все острые грани и элементы оружия должны иметь крышки или насадки. Эти элементы не учитываются при взвешивании.
6. Радиоуправление
6.1. Используемые частоты должны быть разрешены законодательством РФ.
6.2. Робот не должен обладать автономностью. Все управление должно осуществляться исключительно с пульта оператора.
6.3. Все системы роботов должны быть отключаться при потере управляющего сигнала.
6.4. Стабильность управления должна быть продемонстрирована Организаторам заранее для допуска к участию.
6.5. Для избежания конфликтов частоты между роботами участники должны иметь два набора “передатчик-приемник”, работающих на разных частотах.
habr.com
Как сделать робота в домашних условиях: пошаговый план действий
Как сделать робота в домашних условиях, чтобы всё получилось? Нужно начинать с простого и постепенно усложнять! Инструкции по созданию роботов своими руками в домашних условиях буквально заполонили интернет. Не останется в стороне от этого и автор статьи. В целом этот процесс можно разделить на три части: теоретическую, подготовительную и непосредственно сборку. В рамках статьи будут рассмотрены все они, а также описана общая схема разработки чистильщика.
Создание робота в домашних условиях
 Чтобы разработать с нуля, необходимы знания о токе, напряжении, функционировании различных элементов как то триггеры, конденсаторы, резисторы, транзисторы. Также следует научиться паять всё это на схемах и использовать соединительные провода. Необходимо проработать каждый аспект движения и выполнения действий, добиваясь максимальной детализации действий для достижения своей цели. И эти знания необходимы, если вас действительно интересует, как сделать робота в домашних условиях, а не просто праздное любопытство.
Чтобы разработать с нуля, необходимы знания о токе, напряжении, функционировании различных элементов как то триггеры, конденсаторы, резисторы, транзисторы. Также следует научиться паять всё это на схемах и использовать соединительные провода. Необходимо проработать каждый аспект движения и выполнения действий, добиваясь максимальной детализации действий для достижения своей цели. И эти знания необходимы, если вас действительно интересует, как сделать робота в домашних условиях, а не просто праздное любопытство.Подготовительные процессы
 Прежде чем приступать к выяснению, как сделать робота в домашних условиях, необходимо хорошо позаботиться об условиях, в которых он будет собираться. Для начала следует подготовить рабочее место, где будет создаваться желаемое устройство. Необходимо где-то поместить саму конструкцию и составляющие её детали. Следует продумать и вопрос удобного размещения паяльника, канифоли и припоя. Рабочее место должно быть максимально оптимизированным, чтобы оно предоставляло удобство при взаимодействии с конструкцией.
Прежде чем приступать к выяснению, как сделать робота в домашних условиях, необходимо хорошо позаботиться об условиях, в которых он будет собираться. Для начала следует подготовить рабочее место, где будет создаваться желаемое устройство. Необходимо где-то поместить саму конструкцию и составляющие её детали. Следует продумать и вопрос удобного размещения паяльника, канифоли и припоя. Рабочее место должно быть максимально оптимизированным, чтобы оно предоставляло удобство при взаимодействии с конструкцией.Сборка
 Необходимо продумать «костяк» конструкции, на котором всё будет строиться. Обычно выбирают одну деталь, и уже к ней припаиваются все остальные. Говоря о качестве пайки, следует сказать, что места, где она будет проводиться, должны быть очищены. Также, зависимо от толщины используемых проводов и ножек, необходимо подобрать достаточное количество припоя, чтобы элементы не отпадали во время эксплуатации. Для упрощения процессов передачи сигналов и недопущения возможности замыкания можно вытравить печатную плату. Затем на неё наносятся все необходимые элементы, получившаяся конструкция подключается к источнику питания и при необходимости осуществляется доработка устройства.
Необходимо продумать «костяк» конструкции, на котором всё будет строиться. Обычно выбирают одну деталь, и уже к ней припаиваются все остальные. Говоря о качестве пайки, следует сказать, что места, где она будет проводиться, должны быть очищены. Также, зависимо от толщины используемых проводов и ножек, необходимо подобрать достаточное количество припоя, чтобы элементы не отпадали во время эксплуатации. Для упрощения процессов передачи сигналов и недопущения возможности замыкания можно вытравить печатную плату. Затем на неё наносятся все необходимые элементы, получившаяся конструкция подключается к источнику питания и при необходимости осуществляется доработка устройства.Простой робот
Как сделать в домашних условиях что-то не сложное? Да ещё и полезное? Свой дом необходимо держать в чистоте, и данный процесс желательно автоматизировать. Конечно, создать полноценного робота-уборщика сложно, но минимальная конструкция, которая обеспечит собирание пыли с полов комнат – это вполне по силам. Если честно – то будет рассмотрен простой механизм, который работает на одном месте и одновременно убирает мелкий мусор, расположенный в зоне дислокации. Чтобы создать такую конструкцию, необходимо иметь следующие материалы:
- Пластиковую тарелку.
- Три небольшие щетки, которые используются, чтобы чистить обувь или пол.
- Два вентилятора, которые можно взять из отживших своё компьютеров.
- Батарея на 9В и разъем для неё.
- Стяжка или хомуты, которые могут сами защелкиваться.
- Болты и гайки.
Просверлите на равном расстоянии отверстия для щеток. Прикрепите их. Желательно, чтобы все щетки размещались на равной удалённости от других и центра тарелки. Используя болты и гайки, к каждой из них следует прикрепить регулировочное крепление, да и они сами фиксируются с их помощью. Ползунки регулировочных креплений следует установить в среднее положение. Для движения будем использовать вентиляторы. Их подключаем к батарейке и размещаем параллельно, чтобы они обеспечивали вращение робота по кругу. Данная конструкция будет использоваться в качестве вибромотора. Накиньте клеммы и конструкция уже готова к использованию. Если во время процесса чистки робот будет уходить в сторону, поработайте с регулировочными креплениями. Представленная в статье конструкция не требует значительных денежных затрат или наличия навыков и опыта. При создании робота использовались недорогие материалы, достать которые не является значительной проблемой. При желании усложнить конструкцию и заставить её целенаправленно двигаться понадобятся улучшения в виде дополнительных моторов и микроконтроллеров. Вот как сделать робота в домашних условиях. А только подумайте, сколько можно здесь усовершенствовать! Широчайшее поле для конструкторской деятельности.
fb.ru
Изготовление робота. Создание основания или каркаса робота.
Содержание статьи
Теперь, вы выбрали все основные компоненты для сборки робота. Изготовление робота начинается со следующего шага — необходимо спроектировать и построить основание или каркас. Каркас держит их всех вместе и придает вашему роботу законченный вид и форму.

Создание каркаса
Нет никакого «идеального» способа создания каркаса. Почти всегда требуется компромисс. Возможно, вам нужен легкий каркас. Но может потребоваться использование дорогостоящих материалов или слишком хрупких материалов.
Вы можете захотеть сделать надежное или большое шасси. Хоты вы понимаете, что это будет дорого, тяжело или сложно в производстве. Ваш «идеальный» каркас или рама может быть очень сложным.Изготовление каркаса робота может потребовать слишком много времени для разработки и создания.
При этом простой каркас может быть не менее хорошим. Идеальная форма встречается редко, но некоторые проекты могут выглядеть более элегантно из-за своей простоты. Возможно другие проекты могут привлечь внимание из-за их сложности.
Материалы
Существует много материалов, которые вы можете использовать для создания основания. Вы используете все множество материалов для создания не только роботов, но и других устройств. Следовательно вы получите хорошее представление о том, что наиболее подходит для данного проекта.
Список предлагаемых строительных материалов, приведенных ниже включает только наиболее распространенные. Как только вы используете некоторые из них, вы сможете поэкспериментировать с теми, которые не входят в список, или объединить их вместе.
Использовать существующие коммерческие продукты
Вероятно, вы видели школьные проекты, которые были основаны на существующих массовых продуктах. В первую очередь таких как бутылки, картонные коробки и т.д. Это, по сути, «повторное использование» продукта.
Оно может либо сэкономить вам много времени и денег. Хотя и может создать дополнительные хлопоты и головную боль. Есть много очень хороших примеров того, как перепрофилировать материалы и сделать из них очень хорошего робота.
Основной строительный материал
Например, изготовление робота из картона. Некоторые из самых основных строительных материалов могут быть использованы для создания отличных каркасов. Одним из самых дешевых и наиболее доступных материалов является картон. Вы часто можете найти картон бесплатно, и его можно легко вырезать, согнуть, склеить и сложить.

Может быть вы можете создать усиленную картонную коробку, которая выглядит намного более красиво. И она соответствует размеру вашего робота. Затем вы можете нанести эпоксидную смолу или клей, чтобы сделать ее более долговечной. В заключение дополнительно можно разукрасить ее.
Плоский материал для конструкции
Один из наиболее распространенных способов сделать раму – это использовать стандартные материалы, такие как лист фанеры, пластика или металла. И просверлить отверстия для подключения всех исполнительных механизмов и электроники. Прочный кусок фанеры может быть довольно толстым и тяжелы. В то самое время как тонкий лист металла может быть слишком гибким.
Например, доску или фанеру из плотной древесины можно легко разрезать с помощью пилы, просверлить (не опасаясь разрушения), покрасить, отшлифовать и т.д. Следовательно вы можете устанавливать устройства с двух сторон. Например, подключить двигатели и колесики колес к нижней части, а электронику и аккумулятор к верхней части. При этом древесина останется неподвижной и твердой.
Лазерная резка, изогнутый пластик или металл
Если вы находитесь на том этапе, когда вам необходим внешний блок, то лучшим вариантом будет высокоточная резка деталей лазером. Любая ошибка в расчетах будет дорогостоящей и приведет к порче материалов. Для изготовления робота нужна собственная мастерская. Возможно нужно найти компанию, производящую такой тип роботов. Может быть она предлагает множество других услуг, включая работы с металлом и покраску.
3D-печать
3D принтер, печатающий раму или каркас, редко бывает наиболее обоснованным решением (потому что он печатает послойно). В результате этого процесса можно создавать очень сложные формы. Такие формы было бы невозможно (или очень сложно) изготовить другими способами.

Отдельная трехмерная печатная деталь может содержать все необходимые монтажные точки для всех электрических и механических компонентов. При этом способе изготовления каркаса сохраняется незначительный вес изделия. Изготовление робота потребует дополнительной обработки и шлифовки.
Поскольку 3D-печать становится более популярной, цена на детали также снижается. Дополнительно преимуществом 3D-печати является не только то, что ваш дизайн легко воспроизводить, но и им легко делиться. При помощи нескольких кликов мышки можно получить все инструкции по дизайну и файлы САПР.
Полиморф
При комнатной температуре полиморф является твердым пластиком. При нагревании (например, в горячей воде) он становится податливым и может быть сформирован в сложные детали. Затем они охлаждаются и затвердевают в прочные пластмассовые детали.

Обычно пластиковые детали требуют высоких температур и необходимы различные формы для изготовления. Изготовление робота таким способом делает их недоступными для большинства любителей. Например, вы можете комбинировать различные формы (цилиндры, плоские листы и т.д.).
Так формируются сложные пластмассовые структуры, которые выглядят как сделанные промышленным способом. Вы также можете экспериментировать с различными формами и достичь с помощью этого материала многого.
Изготовление робота
Конструирование и изготовление робота нужно производить с учетом выбранных материалов и методов. Выполните следующие шаги, чтобы создать эстетичную, простую и структурно обоснованную раму робота меньшего размера.

- Сначала нужно сделать прототип конструкции, выполненный из бумаги, картона или металла.
- Получите все комплектующие, которые потребуются для изготовления робота (электрические и механические), и измерьте их.
- Если у вас нет всех ваших деталей под рукой, вы можете обратиться к размерам, предоставленным производителем.
- Проведите мозговой штурм и набросайте несколько разных конструкций каркаса в общих чертах. Не делайте это слишком подробно.
- После того, как вы выбрали дизайн, убедитесь что компоненты будут хорошо поддерживаться.
- Нарисуйте каждую часть вашего робота в бумаге или картоне со шкалой 1:1 (реальный размер). Вы также можете нарисовать их с помощью программного обеспечения САПР и распечатать их.
- Протестируйте свой дизайн в САПР и в реальной жизни с помощью прототипа бумаги, проверив каждую деталь и соединения.
- Если вы абсолютно уверены, что ваш дизайн правильный, наконец начните изготавливать каркас из выбранных материалов. Помните, дважды измерьте и вырежьте только один раз!
- Перед монтажом рамы проверьте соответствие каждого компонента и, если потребуются, модифицируйте его.
- Соберите свою раму, используя горячий клей, винты, гвозди или любые другие соединения, которые вы выбирали для изготовления своего робота.
- Установите все компоненты на каркас. Так вы только что создали робота с нуля!
Сборка компонентов робота, из приведенного выше списка заслуживает отдельного рассмотрения.
Сборка компонентов робота
На предыдущих уроках вы выбрали электрические компоненты и исполнительные механизмы. Теперь вам нужно, чтобы они все работали вместе. Как всегда, техническое описание и руководства — это ваши друзья, когда вы понимаете, как должно работать ваше роботизированное оборудование.

Подключение двигателей к контроллерам двигателей
Электродвигатель постоянного тока или линейный привод постоянного тока, скорее всего, имеют два провода: красный и черный. Подключите красный провод к клемме M + на контроллере двигателя постоянного тока, а черный — к M- .
Реверсирование проводов приведет только к вращению двигателя в противоположном направлении. У сервомотора, есть три провода: один черный (GND), красный (от 4,8 до 6 В) и желтый (сигнал положения). Контроллер серводвигателя имеет контакты, соответствующие этим проводам, поэтому сервопривод может быть подключен непосредственно к нему.
Подключение аккумуляторов к контроллеру двигателя или к микроконтроллеру
Изготовление робота включает в себя подключение электропитания. Большинство контроллеров моторов имеют две винтовые клеммы для проводов батареи, обозначенных как B + и B- . Если ваша батарея поставляется с разъемом, а ваш контроллер использует винтовые клеммы, вы можете найти разъем для соединения с проводами.
Провода вы можете подключить к винтовому соединению. Хотя вам может потребоваться найти другой способ подключения аккумулятора к контроллеру двигателя.Возможно, что не все электромеханические устройства, которые вы выбрали для своего робота, могут работать при одинаковом напряжении.
Следовательно, могут потребоваться несколько цепей управления батареями или напряжением. Ниже приведены обычные уровни напряжения, используемые в общих компонентах роботизированных платформ:
- электродвигатели постоянного тока — от 3 до 24 В
- стандартные серводвигатели — от 4,8 В до 6 В
- специальные сервомоторы — от 7,4 до 12 В
- шаговые двигатели — от 6 до 12 В
- микроконтроллеры обычно включают регуляторы напряжения — от 3 до 12 В
- датчики — 3,3 В, 5 В и 12 В
- контроллеры постоянного тока — от 3 до 48 В
- стандартные батареи: 3.7V, 4.8V, 6V, 7.4V, 9V, 11.1V и 12V.
Если вы создаёте робота с двигателями постоянного тока, микроконтроллером и, возможно, сервомеханизмом или двумя, то можно легко понять, что одна батарея не может напрямую управлять всем. Прежде всего, мы рекомендуем выбрать батарею, к которой можно напрямую подключать как можно больше устройств.
Батарея с наибольшей емкостью должна быть связана с приводными двигателями. Например, если выбранные вами двигатели рассчитаны на номинальное напряжение 12 В, то ваша основная батарея также должна быть 12 В. Дополнительно вы можете использовать регулятор для питания микроконтроллера на 5 В.
Техника безопасности при работе с аккумуляторами
Внимание: аккумуляторные батареи являются мощными устройствами и могут легко сжечь ваши цепи, если они подключены неправильно. Прежде всегда тройная проверка правильной полярности и возможности работы устройства с энергией, обеспечиваемой батареей.
Если вы не уверены, не «догадывайтесь». Электричество намного быстрее, чем вы, и к тому времени, когда вы поймете, что что-то не так, волшебный синий дым уже пойдет от вашего устройства.

Подключение контроллеров двигателя к микроконтроллеру
Микроконтроллер может взаимодействовать с контроллерами двигателя различными способами:
- Стандартный: контроллер имеет два контакта с маркировкой Rx (прием) и Tx (передача). Подключите контакт Rx контроллера двигателя к выходу Tx микроконтроллера и наоборот.
- I2C: контроллер двигателя будет иметь четыре контакта: SDA, SCL, V, GND. Ваш микроконтроллер будет иметь те же четыре контакта, но не обязательно помеченные. Просто подключите их один к одному.
- PWM (Pulse-width modulation): контроллер двигателя будет иметь как вход ШИМ, так и цифровой вход для каждого двигателя. Подключите входной контакт PWM контроллера двигателя к выходному контакту ШИМ на микроконтроллере. Соедините каждый цифровой входной контакт контроллера двигателя с цифровым выходным выводом на микроконтроллере.
- R / C: Чтобы подключить микроконтроллер к контроллеру двигателя R / C, вам необходимо подключить сигнальный контакт к цифровому выходу на микроконтроллере.
Независимо от способа связи логика контроллера двигателя и микроконтроллер должны совместно использовать один и тот же опорный сигнал заземления. Это достигается путем соединения контактов GND (земля) вместе.
В первую очередь нужно соединить контакты одного и того же логического высокого уровня. Этого можно добиться, используя тот же вывод V+ для питания оба устройства. Переключатель логического уровня требуется, если устройства не используют одни и те же логические уровни (например, 3.3V и 5V)
Подключение датчиков к микроконтроллеру
При изготовлении робота обязательно используются сенсорные устройстве -в первую очередь датчики. Датчики могут быть сопряжены с микроконтроллерами аналогично контроллерам двигателя. Датчики (сенсоры) могут использовать следующие типы связи:
- Цифровой: датчик имеет цифровой вывод сигнала, который подключается непосредственно к цифровому выходу микроконтроллера. Простой переключатель можно рассматривать как цифровой датчик.
- Аналоговый: аналоговые датчики производят аналоговый сигнал напряжения, который должен считываться аналоговым выводом. Если ваш микроконтроллер не имеет аналоговых контактов, вам понадобится отдельная аналого-цифровая схема (АЦП). Кроме того, некоторые датчики с требуемой схемой питания обычно имеют три контакта: V+, GND и Signal. Например, если датчик представляет собой простой переменный резистор, вам потребуется создать делитель напряжения для считывания полученного переменного напряжения.
- Стандартный или I2C: здесь применяются те же принципы связи, которые описаны для контроллеров двигателей.
Устройство связи с микроконтроллером
Большинство коммуникационных устройств (например, XBee, Bluetooth) используют последовательную связь. Следовательно требуются те же соединения RX, TX, GND и V+. Важно отметить, что, хотя несколько последовательных подключений могут использоваться совместно на одних и тех же выводах RX и TX, для предотвращения перекрестных помех, ошибок и сбоев в целом требуется надежное управление.
Если у вас очень мало последовательных устройств, часто бывает проще использовать один последовательный порт для каждого из них.
Колеса для двигателей
В идеале, вы выбрали колеса или звездочки, которые предназначены для установки на вал вашего электродвигателя. Возможно, вам придется подгонять отверстия для соединения двигателей, рулевого управления и различных проводов в одну конструкцию.
Электрические компоненты для рамы
При изготовлении робота вы можете смонтировать электронные компоненты на раме робота при помощи множества методов. Прежде всего убедитесь в том, что ваши крепления надежны. Основные методы креплений включают в себя: винты, гайки, двухсторонний скотч, липучки, клей, стяжки и т. д.
Практическая часть
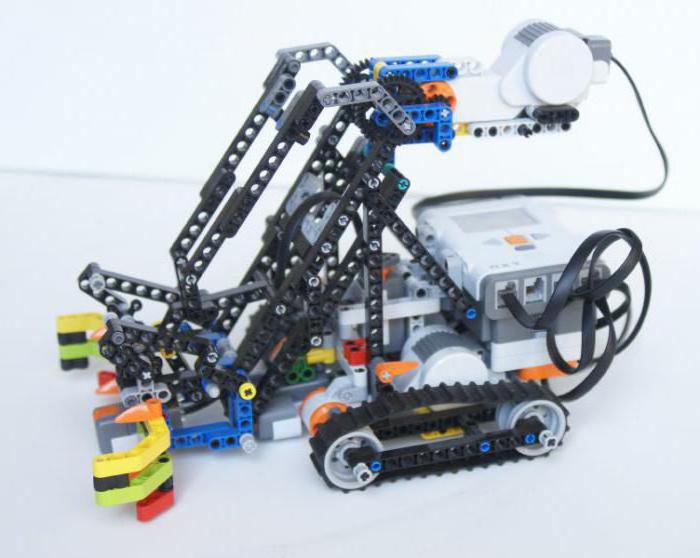
В нашем случае мы будем использовать набор Lego EV3 и для создания каркаса робота нам потребуются только стандартные детали, которые уже входят в состав набора. Изготовление робота на основе набора Лего является прежде всего относительно несложным и достаточно быстрым.
Механические детали набора 45544
legoteacher.ru
Полезные ресурсы для создания робота своими руками
Чтобы создать своего робота, необязательно получать высшее образование по профильной специальности или читать массу литературы по роботостроению. Достаточно воспользоваться пошаговой инструкцией, которую предлагают мастера робототехники на своих сайтах. В Интернете можно найти много полезной информации, посвящённой разработке автономных роботизированных систем.
10 ресурсов для начинающего робототехника
1. Самодельный робот
Информация на сайте позволяет самостоятельно создать робота со сложным поведением. Здесь можно найти примеры программ, схемы, справочные материалы, готовые примеры, статьи и фотографии.
2. RoboZone
Новичкам на сайте посвящён отдельный раздел. Создатели ресурса делают немалый упор на микроконтроллеры, разработку универсальных плат для робототехники и пайку микросхем. Здесь также можно найти исходные коды программ и множество статей с практическими советами.
3. myRobot
На сайте есть специальный курс «Шаг за шагом», в котором детально описан процесс создания простейших BEAM-роботов, а также автоматизированных систем на основе микроконтроллеров AVR.
4. Железный Феликс
Сайт, где начинающие создатели роботов смогут найти всю необходимую теоретическую и практическую информацию. Здесь также размещается большое количество полезных тематических статей, обновляются новости и можно задать вопрос опытным робототехникам на форуме.
5. Робототехника
Данный ресурс посвящён постепенному погружению в мир сотворения роботов. Начинается всё с познания Arduino, после чего начинающему разработчику рассказывают о микроконтроллерах AVR и более современных аналогах ARM. Подробные описания и схемы очень доступно объясняют, как и что делать.
6. BEAM-робот
Сайт о том, как сделать BEAM-робота своими руками. Здесь есть целый раздел, посвящённый основам, также приведены логические схемы, примеры и т. д.
7. Servo-Droid
На этом ресурсе очень доходчиво расписано, как самостоятельно создать робота, с чего начать, что нужно знать, где искать информацию и необходимые детали. Сервис также содержит раздел с блогом, форумом и новостями.
8. Робофорум
Огромнейший живой форум, посвящённый созданию роботов. Здесь открыты темы для новичков, рассматриваются интересные проекты и идеи, описываются микроконтроллеры, готовые модули, электроника и механика. А главное – можно задать любой вопрос по роботостроению и получить развёрнутый ответ от профессионалов.
9. Блог «Роботы и робототехника»
Ресурс робототехника-любителя посвящён в первую очередь его собственному проекту «Самодельный робот». Однако здесь можно найти очень много полезных тематических статей, ссылок на интересные сайты, узнать о достижениях автора и обсудить различные конструкторские решения.
10. Arduino
Аппаратная платформа Arduino является наиболее удобной для разработки роботизированных систем. Информация сайта позволяет быстро разобраться в этой среде, освоить язык программирования и создать несколько несложных проектов.
robo-hunter.com
схема, видео, инструкция по сборке

В современном ритме жизни не всегда получается поддерживать в доме чистоту. В этом деле поможет современные технологии. Робот-пылесос появился более 15 лет назад. Его типовой внешний вид напоминает крупную шайбу, которая передвигается по комнате по заданному алгоритму или случайным образом (пока на что-нибудь не наткнется) и собирает мусор. Предлагаем вам изучить 2 пошаговые инструкции, позволяющие сделать робот-пылесос своими руками.
Материалы для сборки
Итак, для сборки робота-пылесоса нужно разобраться с его составными частями, пойдем по порядку. Он должен сам передвигаться по комнате, поэтому нужны двигатели, в зависимости от конечной конструкции их должно быть от 2-х до 4-х, а также возможность переключения направления вращения и скорость, значит, нужна плата для управления двигателями. Если вы используете двигатели постоянного тока, то нужна плата с 4-мя транзисторами (H-мост).
Самодельный робот-пылесос должен определять столкновения со стенами и мебелью. Для этого нужно предусмотреть датчики препятствия и концевые выключатели на «бампере». Также нужен сам рабочий орган – пылесос. При этом он должен быть рассчитан на работу от постоянного тока низкого напряжения (например, 12В).
Кроме пылесоса нужна подвижная (вращающаяся) щетка, которая будет отчищать поверхность, поднимать ворс половика, сметать мусор. Для этого нужен еще один или два моторчика.
Система, которая будет всем этим управлять. Простейший вариант на Arduino. Для такой задачи подойдет любая из плат, по размерам удобно разместить вариант Nano или Pro mini.
Идея №1: робот-пылесос из картона
Основа робота делается из плотного картона. Его лучше склеить в пару слоев, а волокна разместить перпендикулярно. Для его технической начинки нужен такой набор деталей:
- Любая плата Arduino.
- Breadboard или простая макетная плата, в принципе можно и без неё, всё просто спаять.
- 2 ультразвуковых датчика расстояния (дальномер).
- Турбина от пылесоса.
- Небольшой двигатель или кулер от компьютера.
- Двигатели с редукторами и колеса.
- Контроллер для двигателя.
- Провода для соединений схемы.
- Аккумуляторы и контроллер заряда.
В качестве питания для робота нужно использовать 3 литиевых аккумулятора. Напряжение каждого из них 3,7 В. Для их заряда нужен контроллер. Например, такой как на фото:

Контроллер
Для управления двигателями привода робота удобно использовать модуль на L298-микросхеме. Схемотехнически это H-мост, вы можете его собрать своими руками из отдельных компонентов, но купить готовую плату будет надежнее. С его помощью вы можете задавать скорость движения робота-пылесоса и изменять направление вращения.

Модуль управления
Для регулировки скорости на пин ENA или ENB подаётся ШИМ сигнал, а для задания направления вращения подают разноименные сигналы на IN1 и IN2 для одного двигателя и IN3, IN4 для другого двигателя. При этом если на пине IN1 у нас логическая единица, а на пине IN2 – логический ноль, двигатель крутится в одну сторону, чтобы сменить направление нужно поменять местами 1 с 0. Его нужно собрать с ардуино по такой схеме (пины можно использовать любые, это вы укажете в скетче).

Схема на ардуино
Далее нужно делать основу из картона и закрепить на ней колеса, должно получиться что-то вроде этого:

Основа из картона
Вот вид с нижней стороны. Два ведущих колеса с угловым редуктором и поворотное колесо:

Колесная база
Теперь нужно собрать схему, которая монтируется на основание. Диаметр основания должен быть около 30 см, чтобы туда влезла и электроника и сам блок пылесоса.

Сборка корпуса
Вместо дальномеров можно использовать вариант с бамперами, которые соединены с концевыми выключателями. При столкновении с препятствием система управления даст сигнал о смене направления движения.

Бампер
Контактные бампера можно сделать и своими руками, для этого нужен тонкий, но жесткий провод, например от витой пары. Для этого формирует контактную площадку на внутренней стороне бампера из фольги, и закрепляем проводник как это показано ниже. При столкновениях робота-пылесоса с мебелью и стенами они будут соприкасаться. Вам остается отрегулировать расстояние от проволоки до фольги, чтобы добиться нужной чувствительности и исключить ложные срабатывания. На фольгу подается 5В, а провод идёт на вход Ардуино, подтянутый к минусу через резистор на несколько кОм.

Самодельный контактный бампер
Устройство питается от аккумуляторов, для питания системы управления можно применить линейные стабилизаторы типа l7805. Чтобы отрегулировать скорость вращения моторов подойдет понижающий преобразователь, например LM2596.


Самое сложное — это сконструировать и собрать пылесос. Вот его приблизительный чертеж:

Схема пылесоса
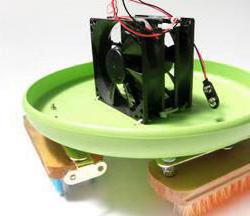
Отламываем родные лопасти от кулера, и закрепляем на его роторе турбину от пылесоса. Важно закрепить турбину точно в центре, иначе вы получите дисбаланс и вибрации.

Турбина робота
Вот так выглядит обратная сторона турбины, закрепленной на роторе кулера. Закрепить её можно на термоклей или на суперклей

Вид турбины изнутри
Вот и вся пошаговая инструкция по сборке робота-пылесоса, сделанного из подручных материалов. Алгоритм его работы такой: робот-пылесос едет вперед, пока не встретит препятствие. После столкновения (или приближения, если вы используете УЗ дальномеры) останавливается, отъезжает назад на заданное расстояние, разворачивается на произвольный угол и едет дальше.
Идея №2: почти заводской робот
Предлагаем вашему вниманию не более сложный проект робота-пылесоса. Вот его внешний вид в собранном состоянии:

Самодельный роботизированный пылесос
Система навигации в нем собрана из комплекта 6-ти ИК-датчиков препятствия. На случай, если не сработал ни один из них, то предусмотрены два контактных датчика (концевых выключателя). Система управления двигателями на таком же драйвере с микросхемой L298N. Для его сборки вам понадобится:
- Плата Ардуино, в оригинале использовалась Pro-mini.
- USB-TTL переходник для прошивки этой модели ардуино. Если вы будете использовать Arduino Nano, то он не нужен, т.к. в ней есть возможность прошивки по USB.
- Драйвер для моторчиков L298N.
- Моторчики для колес с редуктором.
- 6 ИК-датчиков.
- Моторчики для турбины (по возможности помощнее).
- Крыльчатка турбины пылесоса.
- Моторчики для щеток могут быть любыми.
- 2 датчика столкновения.
Всё это собрать по такой схеме:

Схема сборки робота-пылесоса
Для сборки цепи питания робота-пылесоса нужны:
- 4 литиевых аккумулятора, подойдут типа 18650.
- 2 преобразователя постоянного напряжения (повышающий и понижающий).
- Контроллер для заряда и разряда 2-х аккумуляторов (искать в интернете по запросу 2s li-ion controller). В схеме используется последовательное включение двух параллельно включенных банок, в итоге их выходное напряжение получается больше 7,4В, а параллельная цепочка нужна для повышения ёмкости и автономности работы.

Вот схема питания этого робота:

Схема питания
Кроме этого нужен пластик (ПВХ) или любой другой материал для корпуса робота, можно его распечатать на 3D-принтере, если у вас есть такая возможность.
Для работы самоделки нужна прошивка, вот пример алгоритма хаотичной уборки, мы взяли его с сети. Ссылка для скачивания скетча: прошивка для робота-пылесоса.
В этой статье были рассмотрены 2 конструкции робота-пылесоса, которые можно повторить и собрать своими руками. Сделать автоматическое средство для уборки помещения можно, вложившись в бюджет от 30 до 100 долларов. Самыми дорогими деталями являются аккумуляторы, двигатели и платы ардуино. Если у вас получилось собрать самодельный робот-пылесос или вы придумали другую конструкцию, присылайте примеры в комментарии, будем рады открытому общению!
Напоследок рекомендуем просмотреть видео, на которых наглядно демонстрируется еще несколько идей, как сделать робот-пылесос в домашних условиях:
robotobzor.ru